

 science-review.ru
science-review.ru
Стремительный рост микроэлектроники привел к появлению новых видов устройств. Примером нового вида устройств являются беспилотные летательные аппараты (БПЛА). Сейчас почти каждый из нас при желании может приобрести такое устройство. Существуют различные виды БПЛА: мультикоптеры, дроны и т.д. Но среди всех вариантов, самыми популярными являются БПЛА на базе мультикоптера, они имеют малый размер, легки, очень манёвренные, относительно дёшевы и просты в использовании. Относительно небольшие затраты на работы, широкий спектр аппаратных возможностей малых беспилотных аппаратов на базе мультикоптеров и многие другие качества служат предпосылками для использования этих летательных аппаратов в спасательных службах, исследовательских работах, доставке мелкогабаритных грузов и так далее. Однако, на данном этапе развития они все же имеют различные проблемы [1].
Целью работы является определение наилучшего вида БПЛА вертолетного типа на основе анализа основных существующих моделей мультикоптеров и математического моделирования основных характеристик полета.
Материалы и методы исследования
Мультикоптер представляет собой беспилотный летательный аппарат вертолетного типа, имеющий три и более электродвигателей с воздушными винтами [2].
В настоящий момент в продаже имеется широкий выбор моделей, которые возможно разделить на три типа: игрушечные дроны, БПЛА общего пользования и профессиональные БПЛА. В данном исследовании рассмотрены мультикоптеры общего назначения, потому что они, в основном строятся по модульному принципу [3]. И соответственно обладают свойством взаимозаменяемости компонентов, что позволяет создать свою собственную модель и упрощает замену поврежденных деталей.
Важными характеристиками мультикоптеров являются основные характеристики полета: время, темп, дальность полета и т.д. Данные характеристики улучшаются благо-даря повышению аэродинамических свойств, что напрямую связано с полезной нагрузкой и сложностью расположения оборудования, соответственно и с видом мультикоптера. Вид мультикоптера также влияет на увеличение площади основной конструкции и приводит к повышению всей массы дрона. Эту проблему можно решить путем определения наилучшего вида беспилотного летального аппарат на базе мультикоптера.
Результаты исследования и их обсуждение
На основе математического моделирования основных характеристик полета определим наилучший вид БПЛА вертолетного типа.
Рассмотрим четыре основных схемы расположения винтов для мультикоптеров: триоктокоптер (рис. 1, а); квадрокоптер (рис. 1, б); гексакоптер (рис. 1. в); октокоптер (рис. 1. г).

а) б) в) г)
Рис. 1. Схемы построения мультикоптера: а) Y-схема построения триоктокоптера; Х-схема построения: б) квадрокоптер; в) гексакоптер; г) октокоптер
Основные характеристики (количество винтомоторных пар и масса БПЛА) рассматриваемых мультикоптеров, которые будем использовать в дальнейших расчетах, приведены в табл. 1. Винтомоторная пара – винт и мотор мультиоктокоптера, скрепленные вместе и создающие несущую тягу мультиоктокоптера.
Таблица 1
Основные характеристики мультикоптеров
|
Вид мультикоптера |
Количество винтомоторных пар, шт |
масса БПЛА, кг |
|
Трикоптер |
3 |
3,48 |
|
Квадрокоптер |
4 |
3,6 |
|
Гексакоптер |
6 |
3,9 |
|
Октокоптер |
8 |
4,2 |
Основные характеристики винтомоторной пары, влияющие на тягу, приведены в табл. 2. Для моделирования для всех видов мультикоптеров возьмем мотор Tarot 4008/380 KV, аккумулятор LiPo 16000mAh массой 0,378 кг, пропеллер DJI.
Таблица 2
Основные характеристики винтомоторной пары
|
Тяга винтовой пары, кг |
1,62 |
|
Масса винтомоторной пары, кг |
0,144 |
|
Токопотребление винтомоторной пары, А/ч |
10 |
|
Максимальный потребляемый ток, А |
0,5 |
При моделировании использовали формулу для расчета зависимости тяги (полезной нагрузки) от времени полета:
 , (1)
, (1)
где n – количество винтомоторных пар, шт.; Tv – тяга винтомоторной пары – это масса, которую способна поднять одна винтомоторная пара на максимальных оборотах, кг; NAv – токопотребление одной винтомоторной пары, А/ч.; Mv – масса винтомоторной пары, кг; I – максимальный потребляемый ток, А; Mb – масса батареи, кг; Mup – снаряженная масса – масса БПЛА, кг; tp – время полета, с.
Из рис. 2 видно, что конструкция винтомоторной группы октокоптера предоставляет большую грузоподъемность при одних и тех же характеристиках других мультикоптеров.
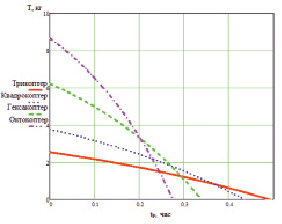
Рис. 2. Зависимость полезной нагрузки от времени полета
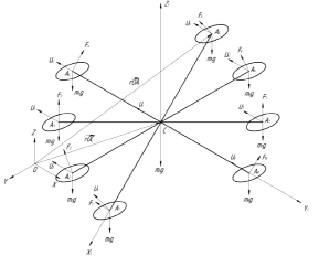
Рис. 3. Графическая схема октокоптера
Для выяснения главных особенностей перемещения октокоптера, особенностей комплекса контроля, необходимо составить математическую модель, которая демонстрирует перемещение дрона.
Рассмотрим основные координатные системы, используемые для описания полета октокоптера (рис. 3). Пусть расположение центра масс октокоптера (С) совпадает с началом подвижной системы координат СX1Y1Z1. В неподвижной декартовой системе координат расположение центра массы октокоптера описывается положением координат X, Y, Z.
Исходя из общих теорем динамики, по методике, описанной в работах [4, 5], и с учетом рис. 3 получена система нелинейных дифференциальных уравнений, описывающих изменение обобщенных координат октокоптера под действием внешних сил:
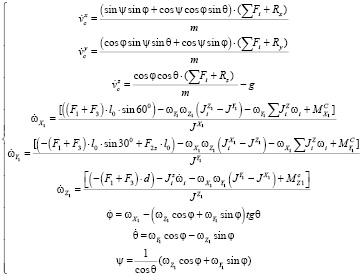 (2)
(2)
где m – вес объекта;  – проекции скоростей центра масс октокоптера на оси ОХ, ОY, ОZ; JTP – сумма моментов инерции вращения вокруг оси винта; IX, IY, IZ – осевые моменты инерции; d – аэродинамическая постоянная; l0 – расстояние между центрами октокоптера и пропеллера; ψ, θ, φ – углы, задающие положение аппарата в пространстве; Х1, Y1, Z1 – проекции угловой скорости тела на оси подвижной системы координат.
– проекции скоростей центра масс октокоптера на оси ОХ, ОY, ОZ; JTP – сумма моментов инерции вращения вокруг оси винта; IX, IY, IZ – осевые моменты инерции; d – аэродинамическая постоянная; l0 – расстояние между центрами октокоптера и пропеллера; ψ, θ, φ – углы, задающие положение аппарата в пространстве; Х1, Y1, Z1 – проекции угловой скорости тела на оси подвижной системы координат.
На основе описанной выше математической модели (2) октокоптера проведем компьютерное моделирование на конкретной модели октокоптера DJIS1000 Premium + A2. Его основные характеристики: 8 винтов; вес модели – 4,2 кг; размер рамы – 723 мм; аккумулятор LiPo 16000mAh, вес аккумулятора – 0,378 кг.
Результаты моделирования представлены на рис. 4 и 5.
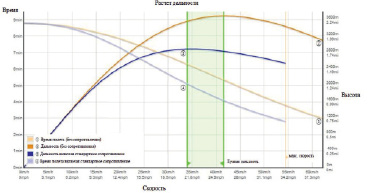
Рис. 4. Модель полета октокоптера
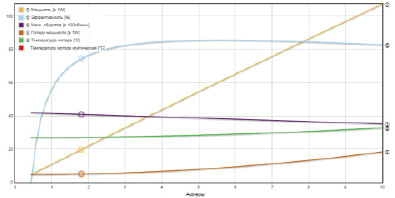
Рис. 5. Характеристики мотора
Моделирование показало, что оптимальный диапазон скорости полета октокоптера составляет 35-40 км/ч, а критическая скорость 55 км/ч. Максимальная высота полета 3600 м. Наилучшие показатели грузоподъемности октокоптер достигает при скорости 35-40 км/ч.
Заключение
Несмотря на все растущую популярность мультикоптеров, существуют нерешенные проблемы, связанные, как с конструкцией, так и с особенностями эксплуатации. Однако, на данном этапе развития мультикоптеров уже существуют различные методы и знания, позволяющие решить большинство данных проблем. Использование октокопторной схемы построения мультикоптеров создаст условие для расширения сферы их применения.
Библиографическая ссылка
Филатенков П.А., Сергун Т.А., Винокуров А.А., Морозова Е.В. ОПРЕДЕЛЕНИЕ НАИЛУЧШЕГО ВИДА МУЛЬТИКОПТЕРА НА ОСНОВЕ МОДЕЛИРОВАНИЯ ОСНОВНЫХ ХАРАКТЕРИСТИК ПОЛЕТА // Научное обозрение. Педагогические науки. 2019. № 2-3. С. 96-100;URL: https://science-pedagogy.ru/ru/article/view?id=1905 (дата обращения: 27.07.2026).