

 science-review.ru
science-review.ru
Введение
Педагогические технопарки «Кванториум» созданы на базе образовательных организаций высшего образования, подведомственных Министерству просвещения Российской Федерации. Оснащение таких площадок современным высокотехнологичным оборудованием проводится в рамках федерального проекта «Современная школа» в составе национального проекта «Образование» и направлено на совершенствование материально-технической базы педагогических вузов [1, 2].
Во ФГБОУ ВО «Шадринский государственный университет» функционирует несколько учебных аудиторий в составе педагогического технопарка «Кванториум». Среди них аудитории для реализации образовательных программ и размещения оборудования естественно-научной и технологической направленности. Учебные аудитории педагогического технопарка задействованы в проведении лабораторных и практических занятий естественно-научной и технологической направленности, разработке исследовательских работ и проектов, реализации практики студентов педагогических направлений подготовки. Работа с педагогическими работниками образовательных организаций реализуется в рамках повышения квалификации педагогических работников, проведения научно-практических, просветительских мероприятий [3, 4]. Оборудование педагогического технопарка широко используется при проведении работы со школьниками через профориентационные мероприятия, практическую подготовку к конкурсам и олимпиадам, проведение учебных и просветительских мероприятий [5–7].
Цель исследования – разработка учебно-методических материалов и проведение научно-просветительских мини-сессий по таким областям, как информатика, физика, для школьников с использованием оборудования педагогического технопарка «Кванториум».
Одной из задач исследования является подготовка организационных и учебно-методических материалов для проведения научно-просветительских мини-сессий с применением оборудования педагогического технопарка «Кванториум». В рамках этой задачи составлены планы проведения мини-сессий, разработаны сценарии и конспекты мероприятий.
Материалы и методы исследования
Исследование проводилось на базе Детского технопарка «Кванториум» г. Шадринска Государственного автономного нетипового образовательного учреждения Курганской области «Центр развития современных компетенций» (ГАНОУ КО «ЦРСК»). При проведении исследования использовалось оборудование аудиторий технологической и естественно-научной направленности.
Для достижения цели и решения поставленных задач применялись теоретические, общенаучные и эмпирические методы исследования. Среди этих методов анализ психолого-педагогических, методических источников, изучение нормативно-правовых документов, изучение и систематизация педагогического опыта, педагогическое проектирование и моделирование.
Результаты исследования и их обсуждение
Учебная аудитория для проведения занятий технологической направленности содержит следующие виды оборудования: проекционное, ноутбуки, робототехнические наборы. Среди робототехнических наборов представлены образовательные модули «Технолаб». Серия наборов «Технолаб» разработана для освоения навыков по конструированию и программированию мобильных роботов и несложных робототехнических устройств. Отдельные модули произведены на базе продукции корейской компании ROBOTIS и американской компании VEX Robotics. Набор «Технолаб. Начальный уровень» предназначен для изучения основ робототехники на уроках информатики, технологии, а также в организации внеурочных занятий. Набор включает пластиковые конструкционные детали (балки и пластины разных форм и размеров, крепежные элементы – штифты, оси, колеса, колеса всенаправленного движения, зубчатые колеса и др.), инструменты для сборки, электронные компоненты (робототехнический контроллер, сервоприводы, датчик касания, сенсорный датчик, датчик расстояния, датчик цвета), а также ресурсный набор «Модель технического зрения» [8].
Образовательные робототехнические наборы «Технолаб» используются для проведения лабораторных практикумов по профильным дисциплинам (Основы робототехники, Образовательная робототехника, Основы робототехники и программирования роботов, Мехатроника и робототехника), для организации проектной и исследовательской деятельности студентов, а также для проведения профориентационных и просветительских мероприятий для школьников. Формат просветительских мероприятий (интерактивная экскурсия, мастер-класс, мини-лекция, лабораторная работа, мини-сессия) выбирается в зависимости от целевой аудитории, используемого оборудования, сложности содержательной части.
В качестве примера приведена разработка научно-просветительской мини-сессии по сборке и программированию мобильного колесного робота, которая была проведена для участников интерактива «Не последний богатырь». Целью данного мероприятия являлось знакомство участников с возможностями робототехнических конструкторов на примере сборки и программирования простого мобильного робота на колесной основе. Занятия в рамках мини-сессии проводились в течение шести дней по 2 академических часа (45 мин). Для приглашения участников на мини-сессию была подготовлена презентация, а по окончании проведена защита проектов участников.
Презентация мини-сессии. С учетом стилистики интерактива «Не последний богатырь» мини-сессия носила название «Сборка самодвижущейся колесницы», а участникам было предложено собрать удивительное чудо – колесницу, способную саму себя двигать, повторив тем самым подвиг трех богатырей – Ильи Муромца, Добрыни Никитича и Алеши Поповича, которые были не просто воинами, а настоящими мастерами робототехники. Также в ходе презентации было кратко рассказано о составе набора «Технолаб. Начальный уровень» и показаны примеры моделей робототехнических устройств, которые можно создать на его основе (колесные, гусеничные и шагающие мобильные роботы, манипуляторы).
Занятие 1. Знакомство с Образовательным робототехническим модулем «Технолаб. Начальный уровень». В ходе занятия ребята познакомились с составом набора, узнали названия конструкционных деталей, попробовали способы крепления деталей, изучили электронные детали конструктора, их характеристики и назначение.
Робототехнический контроллер «Технолаб» оснащен экраном, на котором отображается одноуровневое меню, для управления используются четыре кнопки (стрелки вверх/вниз, подтверждение, отмена). Экран используется для вывода текстовых и графических сообщений. Контроллер оснащен 12 портами, к которым можно подключать моторы и датчики. Для соединения контроллера с компьютером или ноутбуком используется USB-кабель. Электронные элементы набора включают четыре сервопривода и четыре вида датчиков – датчик касания, сенсорный датчик, датчик расстояния, датчик цвета.
Далее были показаны фотографии с примерами мобильных роботов (колесных, гусеничных, шагающих). Затем в ходе обсуждения были сформулированы основные характеристики мобильного робота, который может выполнять движение по прямой вперед/назад, а также повороты.
В практической части участники собрали полноприводную двухмоторную колесную тележку по готовой инструкции. Полный привод обеспечивается за счет использования зубчатой передачи.
Занятие 2. Участники познакомились с интерфейсом среды программирования VEXcode IQ, структурой программы, видами командных блоков, командами управления моторами [9, 10].
Все команды разделены на несколько категорий (вывод на экран, звуки, события, управление, измерение, операторы, переменные, мои блоки, комментарии). Блоки «Начало / Конец программы» находятся в разделе «События». Для управления движением робота используются команды из категории «Движение». Длительность работы моторов можно задавать в дюймах или миллиметрах, а совместное использование команд «Включить моторы» и «Ждать заданное время (в секундах)» позволяет задать движение робота по времени.
Для прямолинейного движения используется работа двух моторов на одинаковой скорости. Для выполнения поворотов два мотора вращаются с одинаковой скоростью, но в разных направлениях (быстрый поворот – робот вращается вокруг своей оси), либо вращается только один мотор (плавный поворот – робот вращается вокруг неподвижного колеса), либо два мотора вращаются в одном направлении, но с разными скоростями (нормальный поворот – робот движется по дуге).
В практической части занятия составлялись программы для выполнения роботом прямолинейного движения на заданное расстояние и разных видов поворотов на определенный угол.
Занятие 3. Ознакомление с заданиями (траектории движения робота) и обсуждение необходимых элементов в конструкции робота (количество и виды колес, количество моторов, конструкция корпуса) для выполнения заданных видов движения.
Траектории, на выполнение которых нужно запрограммировать робота в ходе тренировок:
− «Прямая» – движение по прямой на 50 см;
− «Туда-обратно» – движение по прямой на 50 см, разворот на месте (быстрый поворот) на 180 градусов, возврат в точку старта;
− «Угол» – движение по прямой 50 см, разворот на 90 градусов (плавный поворот), движение прямо на 50 см;
− «Квадрат» –движение по квадрату (повторить 4 раза: прямо 50 см, быстрый поворот на 90 градусов;
− «Дуга» движение по дуге – половина окружности (нормальный поворот – должны работать оба мотора);
− «Окружность» – движение по окружности (нормальный поворот – должны работать оба мотора);
− «Змейка» – три блока движения по дуге (направо, налево, направо);
− «Треугольник» – движение по контуру треугольника (повторить 3 раза: прямо 50 см, быстрый поворот на 60 градусов.
В практической части заданий участники продумывают конструкции своей модели колесного робота и начинают его сборку (рис. 1).
Занятие 4. На занятии проходит доработка конструкций роботов (рис. 2) и программирование роботов для выполнения движений прямо и разных видов поворотов.
Занятие 5. Составление программ для прохождения роботом различных траекторий, рассмотренных на занятии 3.
Примерные программы для выполнения заданий приведены на рис. 3–5.
Занятие 6. Подготовка к защите проекта – подготовка презентации своего мобильного робота.
Занятие 7. Защита проекта. Участники представляли свои модели, рассказывали о конструкции и особенностях, а затем демонстрировали возможности своих моделей при выполнении заданий. Для выполнения предлагалось выбрать по два задания (вытягивание карточек с заданиями). Первое задание на выполнение движения по траектории (прямая, угол, туда-обратно, квадрат, треугольник), второе задание – турнирное задание «Автошкола» на полигоне 1 [11].
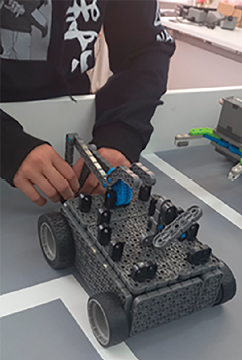
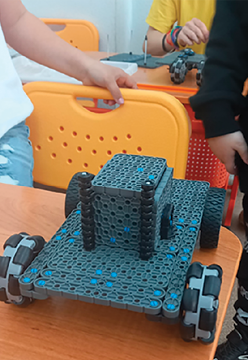
Рис. 1. Примеры моделей двухмоторных роботов Источник: составлено авторами
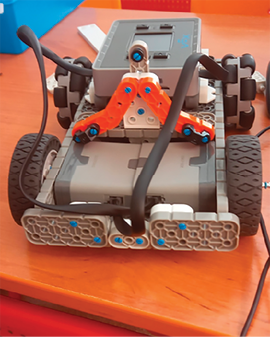
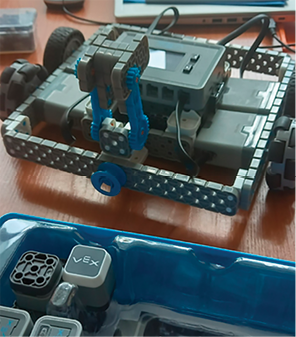
Рис. 2. Примеры моделей двухмоторных роботов Источник: составлено авторами
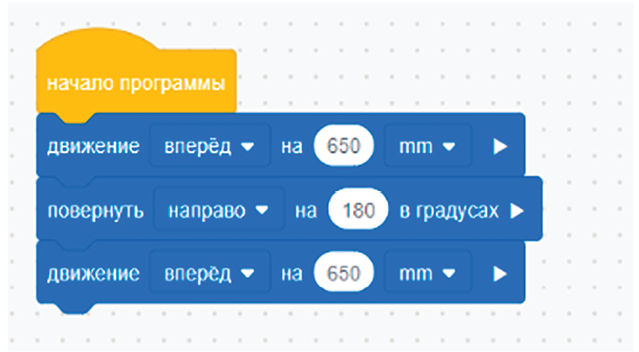
Рис. 3. Программа для траектории «Туда-обратно» Источник: составлено авторами
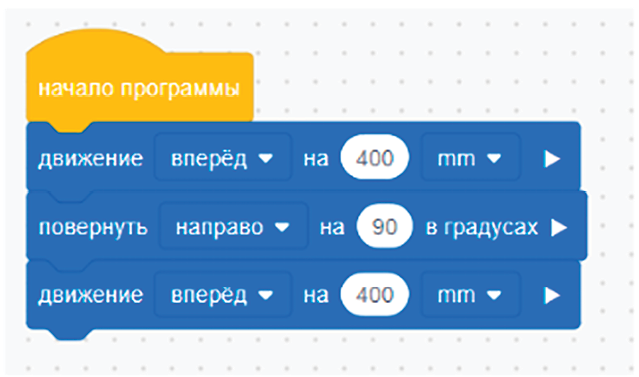
Рис. 4. Программа для траектории «Прямой угол» Источник: составлено авторами
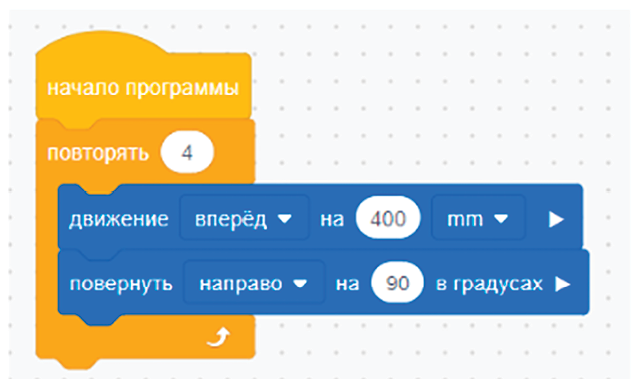
Рис. 5. Программа для траектории «Квадрат» Источник: составлено авторами
При подведении итогов были награждены три победителя. По итогам работы проводится рефлексия, в ходе которой участникам предлагается ответить на вопросы о том, что им понравилось / не понравилось, какая деятельность заинтересовала больше – конструирование или программирование, что бы они хотели узнать о робототехнических устройствах, понравилось ли выполнять предложенные задания.
Задания для занятий в рамках могут быть связаны с другой тематикой [12], могут быть более сложными [13–15] в зависимости от подготовленности участников.
Заключение
Разработанные материалы могут быть адаптированы для использования любого доступного робототехнического набора. Подготовленные в ходе исследования разработки могут быть использованы учителями информатики, технологии, педагогами дополнительного образования, студентами педагогических направлений подготовки при прохождении практики, а также школьниками и студентами для изучения основ программирования роботов.
Конфликт интересов
Библиографическая ссылка
Козловских М.Е., Неверова И.В. НАУЧНО-ПРОСВЕТИТЕЛЬСКАЯ МИНИ-СЕССИЯ «СБОРКА И ПРОГРАММИРОВАНИЕ ДВУХМОТОРНОЙ ТЕЛЕЖКИ ИЗ РОБОТОТЕХНИЧЕСКОГО КОНСТРУКТОРА» // Научное обозрение. Педагогические науки. 2025. № 5. С. 34-39;URL: https://science-pedagogy.ru/ru/article/view?id=2594 (дата обращения: 17.06.2026).
DOI: https://doi.org/10.17513/srps.2594