

 science-review.ru
science-review.ru
Под дистанционным зондированием понимается метод получения информации о физическом объекте на расстоянии при помощи целенаправленной обработки принятых электромагнитных (ЭМ) волн, которые провзаимодействовали с исследуемым объектом. Энергия ЭМ-волн может принадлежать как собственному излучению физического тела, так и быть отражённой энергией от постороннего источника, например, Солнца или радиолокационной станции (РЛС) [1]. Электромагнитное излучение характеризуется частотой колебаний f и длиной волны λ, связанные между собой соотношением c= λf, где с≈3?108 м/c – скорость распространения ЭМ-волн в вакууме.
В дистанционном зондировании и в целом ряде важных прикладных направлений активно используется инфракрасный диапазон от красной границы видимого спектра до длин волн порядка 100 мкм, в котором заключена основная часть энергии теплового излучения объектов земной поверхности [2]. Огромную роль в дистанционном зондировании земной поверхности играет атмосфера Земли, которая существенным образом препятствует прохождению ЭМ-волн видимого и ИК диапазонов. Вполне удовлетворительно с малым рассеянием и поглощением сквозь атмосферу Земли проходят ЭМ-волны радиодиапазонов. Авиационная и космическая радиолокационная съёмка осуществляется в миллиметровом, сантиметровом и дециметровом диапазонах длин волн.
В процессе полёта спутника по орбите или самолета, антенна на борту излучает радиоволны в направлении земной поверхности под углом к ней (рис. 1). Радиолокационное изображение формируется путём регистрации отраженного поверхностью Земли сигнала по наклонной дальности. Съёмку непосредственно под носителем (в надир) не проводят, так как в этом случае дальности различаются незначительно, обратные сигналы от близких объектов местности возвращаются к радиолокатору почти одновременно и на снимке эти объекты неразличимы [3], поэтому подобные системы носят название радиолокационные станции бокового обзора (РЛС БО), то есть РЛС как бы смотрят вбок от направления движения. Углом съёмки обычно называют углы падения – θб и θд, соответственно для ближней и дальней зоны. Угол падения ЭМ-волны для современных космических радиолокационных систем может варьировать в больших пределах: например, для ИСЗ Radarsat-2 – от 10° до 60°. Весь диапазон углов падения определяет ширину полосы обзора – полосу на земной поверхности, в пределах которой может проводиться съёмка.
Важнейшей характеристикой РЛС БО является пространственное разрешение, которое определяется длиной волны ЭМ-излучения и шириной диаграммы направленности антенны в направлении движения летательного аппарата (ЛА) (азимута) и разрешением по наклонной дальности ρsr пропорционально длительности импульса: чем короче импульс, тем выше разрешение. Оно вычисляется по формуле ρsr = τc/2, где τ – длительность импульса, c – скорость света в вакууме. При работе со снимками земной поверхности значение имеет пространственное разрешение на земной поверхности ρgr, которое определяется через разрешение по наклонной дальности по формуле:
ρgr = ρsr/cos(90–θ) =ρsr/sinθ, (1)
где θ – угол падения волны [3].
В РЛС БО используют антенну с ножеобразным лучом. Её устанавливают вдоль фюзеляжа самолёта таким образом, чтобы плоскость луча была перпендикулярна линии полёта (или расположена под заданным углом) и чтобы луч был направлен вниз к земной поверхности (рис. 2). Часто используют двусторонний обзор вправо и влево относительно линии полета носителя. Отраженный сигнал от объектов приходит с задержками относительно зондирующего импульса на время td распространения радиоволн
 , (2)
, (2)
где R – дальность до цели, с – скорость распространения электромагнитной энергии.
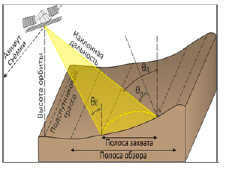
Рис. 1. Геометрия радиолокационной съемки
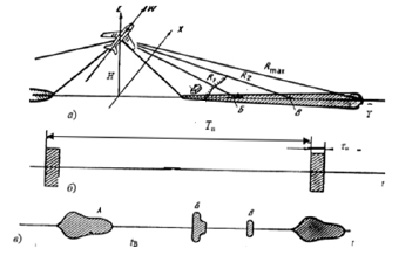
Рис. 2. РЛС БО: а – геометрия обзора пространства; б – зондирующий сигнал; в – отраженный сигнал; А, Б, В – радиолокационные цели; Y – горизонтальная дальность
Начало строки соответствует моменту излучения зондирующего импульса. В момент прихода отраженного сигнала от цели яркость пятна возрастает пропорционально мощности принятого сигнала [4, 5]. Изображение на экране РЛС или на фотопленке напоминает карту местности. Различие состоит в том, что на экране регистрируется не горизонтальная, а наклонная дальность. Это вносит искажения, особенно при съемке с больших высот: масштаб изображения на малых дальностях резко меняется, а на краю может появиться темная полоса, дальность до которой определяется высотой полета.
а б

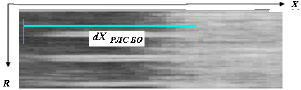
Рис. 3. Изображения земной поверхности в РЛС БО
На рис. 3,а представлено выходное изображения в РЛС БО. А на рис.3,б показан увеличенный фрагмент радиолокационного изображения от трех судов на морской поверхности и часть суши. Размер кадра на местности примерно 40×40 км. В РЛС БО, где разрешающая способность по азимуту равна около 3 км, отметки вытянуты по оси X. Длина отметки от судна равна размеру зоны облучения Xa, вдоль линии пути, определяющей азимутальное разрешение δXРЛС БО. Разрешающая способность по азимуту РЛС БО определяется размерами апертуры антенны в вертикальной плоскости и длиной волны. Для радиодиапазона, когда λ равна 1÷100 см, на высотах зондирования порядка 1 км разрешающая способность по размерам объектов составляет несколько км, что является неприемлемым для различных приложений. Для решения задачи уменьшения элемента разрешения в РЛС БО при зондировании земной поверхности был разработан метод синтезирования апертуры (СА) за счет движения летательного аппарата. При СА для получения высокого разрешения вдоль линии пути необходимо максимально увеличивать горизонтальный размер антенны Dг. Принцип синтезирования состоит в том, что на самолете устанавливается малоразмерная антенна, приемопередатчик делается когерентным, способным определять не только огибающую, но и фазу отраженного сигнала [4]. Искусственный раскрыв синтезированной антенны в РСА соизмерим с размером элемента разрешения РЛС БО вдоль линии пути и значительно превышает размеры физической антенны, установленной на самолете, что и позволяет реализовать высокое разрешение в РЛС СА.
Угловая разрешающая способность в радианах РЛС СА по линии пути определяется не раскрывом реальной антенны, установленной на самолете, а длиной синтезирования La:
 . (3)
. (3)
В синтезированной антенне в каждом положении самолета сигнал проходит от антенны до цели и обратно от цели до антенны, в результате чего он получает двойной фазовый набег [4]. Линейное разрешение РЛС СА по путевой дальности определяется длиной синтезированной антенны и наклонной дальностью R:
 . (4)
. (4)
Запись фазовой структуры отраженного сигнала в РЛС СА называется радиоголограммой. Синтез радиоголограммы с длиной апертуры  позволяет реализовать предельное азимутальное разрешение, близкое к Dг/2 с получением детального радиоизображения , фрагмент которого приведен на рис. 4.
позволяет реализовать предельное азимутальное разрешение, близкое к Dг/2 с получением детального радиоизображения , фрагмент которого приведен на рис. 4.
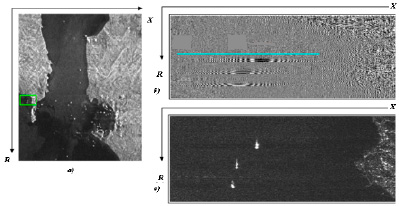
Рис. 4. Восстановленные изображения в РЛС СА (а, в) и радиоголограмма (б)
В первых РЛС СА использовался оптический синтез искусственной апертуры. Применялись также электронные методы синтеза. В настоящее время все эти методы вытеснены цифровым синтезом апертуры с использованием универсальных вычислительных машин или спецвычислителей на сигнальных процессорах.
Библиографическая ссылка
Хамадж Наср Еддин, Сальников И.И. МЕТОДЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В РАДИОДИАПАЗОНЕ ЭЛЕКТРОМАГНИТНЫХ ВОЛН // Научное обозрение. Педагогические науки. 2019. № 3-2. С. 101-105;URL: https://science-pedagogy.ru/ru/article/view?id=1966 (дата обращения: 20.07.2026).