

 science-review.ru
science-review.ru
Scientific journal
Научное обозрение. Педагогические науки
ISSN 2500-3402
ПИ №ФС77-57475
DEVELOPMENT OF CONTROL AND MEASURING MATERIALS FOR TEACHING QUATERNION ALGEBRA COURSE TO ENGINEERING STUDENTS

Введение
Распоряжением Правительства Российской Федерации от 19.11.2024 № 3333-р утверждён «План улучшения математического и естественно-научного образования». Среди намеченных мероприятий, реализация которых распланирована до 2030 года, актуализация концепций преподавания математики, разработка методических материалов для учебно-методических объединений, создание сценариев учебных заданий – интерактивных контекстных задач, лабораторных и практических работ.
Особое внимание уделено формированию готовности к осуществлению педагогической деятельности и получению дополнительной педагогической квалификации студентами, обучающимися по образовательным программам высшего образования в области математики, естественных и инженерно-технических наук, что позволит восполнить нехватку педагогических кадров в стране.
Цель исследования – разработка курса алгебры кватернионов, реализованная в электронной информационно-образовательной среде, для студентов инженерных специальностей, изучающих системы управления летательных аппаратов, создание приборов навигации и ориентации летательных аппаратов.
Материалы и методы исследования
Работа проводилась на кафедре ФН-11 (вычислительная математика и математическая физика НУК ФН МГТУ им. Н. Э. Баумана) и в НОЦ СИМПЛЕКС НУК ФН МГТУ им. Н. Э. Баумана, в течение 2025 года. Первая апробация обновлённого курса велась с сентября 2025 года на факультете РКТ МГТУ им. Н. Э. Баумана в группе РКТ-1-51 (специальность ИУ-1). В основу разрабатываемого курса легла программа преподаваемого ранее на факультете РКТ курса «Теория кватернионов». Уже существующие задания были проанализированы и переведены в цифровое поле. По источникам для разработки лекционного материала [1, с. 10-98] список задач был дополнен. Проведен анализ возможности студентов воспринимать предложенный материал, исходя из ранее пройденных фундаментальных предметов. Авторы консультировались с разработчиками программного обеспечения для образцов техники на основе кватернионов, создавая задачи для данного курса. По результатам апробации обновленного курса в реальной студенческой группе сделаны выводы и приняты решения о корректировке программы и дополнении списка заданий.
Результаты исследования и их обсуждение
В связи с известными событиями мы наблюдаем бурное развитие беспилотной летательной техники как военного, так и гражданского назначения. Вопросы навигации и ориентации летательных аппаратов в пространстве являются ключевыми при их разработке. Поэтому интерес к кватернионам в настоящее время будет только возрастать. Этой цели и посвящён усовершенствованный курс преподавания алгебры кватернионов, реализованный в электронной информационно-образовательной среде. Кватернионы, или гиперкомплексные числа, открытые Уильямом Роуэном Гамильтоном в 1843 г., широко применяются в таких областях знания, как компьютерная графика, квантовая механика, теоретическая физика. Методика преподавания алгебры кватернионов для будущих инженеров – специалистов по системам автоматического управления, приборам навигации и ориентации летательных (в том числе космических и беспилотных) аппаратов, системам стабилизации бесплатформенных инерциальных систем представляет определённый интерес и имеет свою специфику. Описание движения тел с помощью кватернионов неразрывно связано с матрицами направляющих косинусов углов Эйлера – Крылова, при этом имеет ряд преимуществ. Однако противопоставлять эти два метода не стоит, лучше и полезнее рассматривать их в комплексе. Поэтому одна из задач (№1 второй части домашнего задания) посвящена составлению матрицы направляющих косинусов, подробное описание в [2].
«Теория кватернионов», как самостоятельный курс, долгое время преподавался на факультете ракетно-космической техники МГТУ им. Н. Э. Баумана. Много лет его вела Н. С. Полякова, а теперь, после её кончины, ведут молодые преподаватели кафедры вычислительной математики и математической физики ФН-11. Курс был рассчитан на 8 лекций и 8 семинаров в течение одного, пятого, учебного семестра. Именно на его базе сотрудниками кафедры с помощью компьютерной математики были разработаны новые контрольно-измерительные материалы, а уже имеющиеся, созданные Надией Салихжановной, оцифрованы и загружены в электронную информационно-образовательную среду (ЭИОС).
Расширен список задач в домашнем задании, разработаны задания для рубежного контроля, включая тестовые вопросы. Задания данного курса могут быть использованы, полностью или частично, как включения в другие курсы. Например, они используются в курсе «Основы теории систем» для студентов-бакалавров второго курса кафедры ИУ-1.
В планах разработчиков курса ознакомить с заданиями коллег с кафедры ИУ-2 «Приборы ориентации и навигации», для возможного использования в их работе.
В течение семестра студенты выполняют домашнее задание, для удобства разделённое на две части, и две контрольные работы. Все разработанные задания будут выдаваться через ЭИОС и проверяться компьютером, что облегчает работу преподавателя. Для каждой предложенной студенту задачи в ЭИОС есть специальный раздел «Семинар», в котором подробно обоснован метод решения и разобраны примеры, подобные тем, что содержатся в домашней работе.
Числовые примеры реализованы с помощью компьютерной программы, поэтому вероятность ошибки практически исключена, и количество задач позволяет каждому студенту получить индивидуальное задание без повтора.
Успешному освоению данного курса предшествуют изучение линейной алгебры и теории функций комплексного переменного [3], преподаваемых, как правило, на первом и втором курсе во многих технических вузах. Можно внести алгебру кватернионов, как часть, в курс ТФКП. Комплексные числа можно рассматривать как подмножество в пространстве кватернионов, но изучать лучше от простого к более сложному, начиная с чисел с одной мнимой частью.
В рамках подготовки задач была разработана программа, позволяющая автоматически генерировать разнообразные варианты заданий [4-6]. Программа охватывает ключевые типы задач: арифметические действия с кватернионами, операции умножения, решение уравнений, а также прикладные задачи, связанные с матрицей направляющих косинусов и преобразованием кватернионов. Генерация осуществляется с учётом заданных параметров сложности и структуры, что позволяет формировать как тренировочные, так и контрольные задания. Алгоритм работы программы для всех видов задач состоит из нескольких этапов. На первом этапе задаем все необходимые кватернионы и инициализируем данные, используя случайную генерацию чисел. Затем вычисляем все необходимые вспомогательные кватернионы и выполняем преобразования по правилам сложения, умножения и деления. Результаты программы представляют собой наборы кватернионов с их компонентами. Пошаговый вывод промежуточных и конечных результатов помогает проследить логику преобразований.
Дополнительно была реализована программа для автоматического решения сгенерированных задач. Она обеспечивает пошаговое вычисление результатов, включая упрощение выражений и проверку корректности решений. Совокупность этих программ позволяет оперативно сформировать широкий спектр разнообразных заданий и существенно снижает время на самостоятельную проработку вариантов и их проверку.
Домашнее задание (часть первая) включает задачи:
Задача № 1. Арифметические действия с кватернионами.
Эта задача состоит в вычислении линейной комбинации двух кватернионов. Реализация задачи в ЭИОС представлена на рисунке 1.
Задача № 2. Умножение кватернионов. Реализация задачи в ЭИОС представлена на рисунке 2.
Задача № 3. Представление кватерниона в тригонометрической форме, вычисление нормы, тензора, верзора кватерниона.
Задача № 4. Решение уравнения с неизвестным кватернионом вида  или
или  . Реализация задачи в ЭИОС представлена на рисунке 3.
. Реализация задачи в ЭИОС представлена на рисунке 3.
Первая часть является вводной, ознакомительной и универсальной. Задачи предназначены для отработки навыков работы с кватернионами, освоения понятий и основных арифметических действий.
Рис. 1. Вид задачи 1 в ЭИОС (изображение с сайта nomotex.ru)
Рис. 2. Вид задачи 2 в ЭИОС (изображение с сайта nomotex.ru)
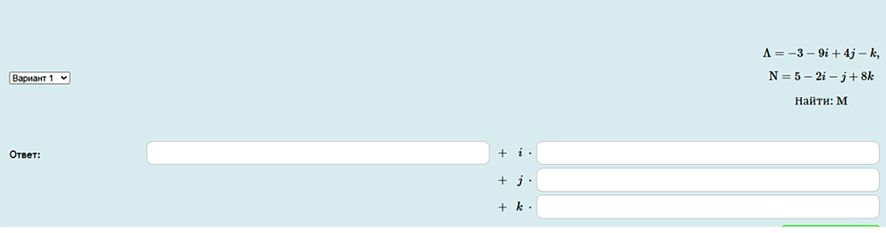
Рис. 3. Вид задачи 4 в ЭИОС (изображение с сайта nomotex.ru)
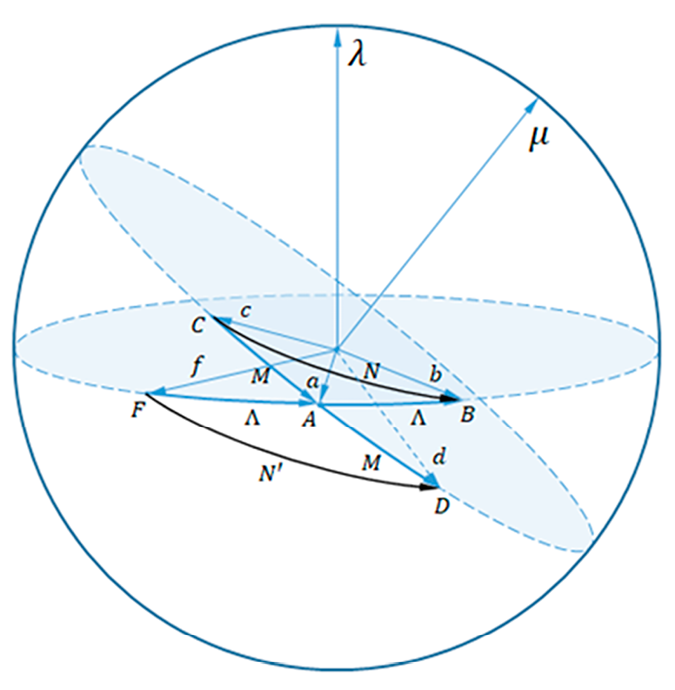
Рис. 4. Представление умножения кватернионов на сфере Источник: рисунок создан авторами для данной статьи
Параллельно в курсе лекций необходимо освещение представления кватернионов как дуг на сфере (рис. 4), графическое представление умножения кватернионов в виде сложения дуг и переход к операции представления вращения с помощью кватернионов  , где нормированный кватернион поворота на угол ϑ вокруг оси ζ представлен в тригонометрической форме
, где нормированный кватернион поворота на угол ϑ вокруг оси ζ представлен в тригонометрической форме
 .
.
Лекционный материал разрабатывается на основе источника [1]. Также авторы считают полезным рассмотреть в лекционном курсе тему вектора конечного поворота и связь его параметров с параметрами кватерниона поворота. В данном контексте стоит в курсе аналитической геометрии уделить время двойному векторному произведению и его геометрическому смыслу [7, с. 199-215]. На рисунках 5 и 6 представлено преобразование вращения с помощью вектора конечного поворота и его составляющие.
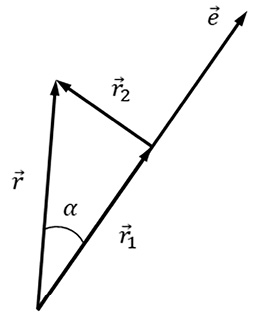
Рис. 5. Разложение вектора на составляющие с помощью вектора конечного поворота
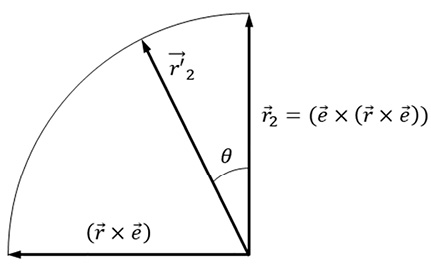
Рис. 6. Использование двойного векторного произведения для представления разложения вектора
Вторая часть домашнего задания посвящена введению в теорию ориентации твердого тела. Так как математическое описание движения твердого тела тесно взаимосвязано с понятиями углов Эйлера – Крылова, матрицами направляющих косинусов, вводная задача второй части посвящена составлению матриц направляющих косинусов при трёх последовательных поворотах. Подробное описание данной задачи представлено в источнике [2; 8; 9]. Возможно рассмотрение практического применения полученных навыков, таких как написание рефератов по источникам, например [10].
Текст задания № 1 второго ДЗ: летательный аппарат (самолёт) ориентирован в начальный момент времени по географической системе координат: продольная ось самолёта Ох совпадает с осью Оξ, направленной на север, нормальная ось Оу самолёта совпадает с местной вертикалью Оη, ось Оz, направленная в правое крыло, совпадает с осью Оζ, направленной на восток. Самолёт совершает маневр, состоящий из трёх поворотов на углы Эйлера в заданной последовательности.
1. Нарисовать эскиз трёх последовательных поворотов с указанием углов и угловых скоростей на единичной сфере.
2. Составить матрицу направляющих косинусов углов между осями систем координат Охуz и Оξηζ, используя промежуточные матрицы направляющих косинусов для каждого поворота.
3. Записать матрицу направляющих косинусов при заданных значениях углов Эйлера.
4. Перевести координаты вектора  , заданного в связанной системе координат, в координаты опорной системы.
, заданного в связанной системе координат, в координаты опорной системы.
5. Перевести координаты вектора  , заданного в опорной системе координат, в координаты связанной системы.
, заданного в опорной системе координат, в координаты связанной системы.
6. Найти координаты направляющего вектора оси, вокруг которой осуществлён поворот. В ответ записать нормированный вектор.
Заметим, что в данной задаче студенту не приходится выполнять громоздких вычислений. Он должен лишь составить по правилу три матрицы направляющих косинусов, соответствующих последовательным поворотам на заданные углы крена, тангажа и курса в заданной последовательности. После введения параметров матрицы результирующая матрица вычисляется в ЭИОС, после указания студентом порядка умножения (рис. 7). Кроме того, в задаче представлена визуализация поворотов на сфере.
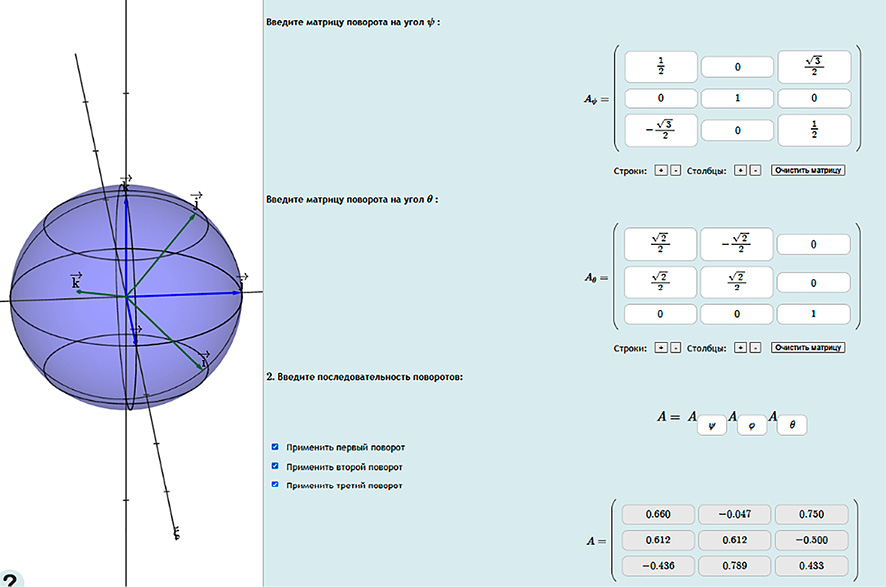
Рис. 7. Вид задачи 1 ДЗ № 2 в ЭИОС (изображение с сайта nomotex.ru)
Методическая ценность этой задачи состоит в том, что от изучаемых в курсе линейной алгебры понятий матрицы перехода и матрицы линейного оператора происходит погружение в прикладную область теории навигации и ориентации. Кроме того, вычисляются координаты вектора конечного поворота методами собственных чисел линейного оператора вращения.
Задача № 2 посвящена связи матрицы направляющих косинусов и параметров кватерниона поворота. Текст задания. Базис E получается из базиса I поворотом вокруг вектора  , координаты которого заданы в исходном базисе I, на угол
, координаты которого заданы в исходном базисе I, на угол  .
.
а) Найдите матрицу данного ортогонального преобразования.
б) Найти координаты неизменного вектора  , изначально заданного в базисе I, в базисе E.
, изначально заданного в базисе I, в базисе E.
в) Найти координаты вектора  , изначально заданного в базисе E, в базисе I.
, изначально заданного в базисе E, в базисе I.
Задача № 3. Сложение поворотов в опорной системе координат.
Текст задания. Найти кватернион, соответствующий результирующему повороту, если были выполнены два поворота: первый – на угол ϑ вокруг вектора  , второй – на угол γ вокруг вектора
, второй – на угол γ вокруг вектора  , вычислить координаты образа вектора
, вычислить координаты образа вектора  , который получается в результате двух последовательных поворотов. Все векторы заданы в координатах опорного базиса.
, который получается в результате двух последовательных поворотов. Все векторы заданы в координатах опорного базиса.
Задача № 4. Вектор Гиббса.
Текст задания. Дан вектор Гиббса:  . Определить угол и ось поворота, задаваемые вектором Гиббса, и найти образ вектора при данном преобразовании.
. Определить угол и ось поворота, задаваемые вектором Гиббса, и найти образ вектора при данном преобразовании.
Задача № 5. Связь матрицы ортогонального преобразования с параметрами Родрига – Гамильтона.
Текст задания. Ортогональное преобразование с матрицей А переводит базис  в базис
в базис  . По заданной матрице найдите:
. По заданной матрице найдите:
а) параметры Родрига – Гамильтона;
б) параметры Кэли – Клейна;
в) вектор Гиббса данного преобразования.
Задача № 6 создана на основе реального алгоритма, предоставленного разработчиками программного обеспечения работы БИНС (бесплатформенной инерциальной навигационной системы).
Текст задания. Летательный аппарат (ЛА) и связанная с ним система координат совершает три последовательных поворота относительно опорной системы координат. Составить матрицы ортогонального преобразования для каждого поворота в локальных базисах, выписать собственные кватернионы, соответствующие каждому из поворотов. Вычислить собственный кватернион результирующего поворота.
Задания 2-6 второй части домашнего задания включают в себя довольно объёмные вычисления. Поэтому оправданным для студента является привлечение возможностей вычислительной техники. В частности, написание программы умножения кватернионов для выполнения операции вращения. Возможности ЭИОС позволяют выполнять проверку введенных результатов в различной форме, в том числе в виде десятичных дробей с точностью до трёх знаков после запятой. Некоторые вычисления выполняются в самой ЭИОС. Все задания снабжены подробным алгоритмом, включающим в себя описание задания, теоретические обоснования, все необходимые формулы. Также для каждого задания обязательно есть выполненные примеры. Всё это способствует прочному усвоению материала.
Контрольные аудиторные работы должны включать задания, не требующие громоздких вычислений. Например, арифметические действия, уравнения с кватернионами. Задание на операцию вращения стоит формировать для векторов, имеющих одну или две нулевые координаты. Также полезно включать в контрольные мероприятия тестовые теоретические задания с выбором правильных ответов и проверкой в ЭИОС.
Пример тестового билета (знаком «минус» помечено неправильное утверждение).
1. Чтобы составить матрицу поворота вокруг вектора  на угол , надо выполнить операцию вращения
на угол , надо выполнить операцию вращения  для каждого из базисных векторов, поставив каждому в соответствие кватернион, и результаты вычисления занести в матрицу A. Кватернионом преобразования
для каждого из базисных векторов, поставив каждому в соответствие кватернион, и результаты вычисления занести в матрицу A. Кватернионом преобразования
является нормированный кватернион в тригонометрической форме (кватернион с параметрами Родрига – Гамильтона), векторная часть которого соответствует нормированному вектору  .
.
2. Вектор Гиббса задаёт операцию вращения вокруг оси вектора  на угол
на угол  .
.
3. Два последовательных поворота, задаваемых нормированными кватернионами в исходном базисе
– на угол ϑ вокруг оси ζ и
 – на угол γ вокруг оси ξ,
– на угол γ вокруг оси ξ,
соответствуют операции  .
.
Тогда композиция двух вращений эквивалентна одному вращению
 – вокруг оси ν на угол ψ.
– вокруг оси ν на угол ψ.
4. Элементы матрицы  называются параметрами Кэли – Клейна.
называются параметрами Кэли – Клейна.
При этом:

тогда, 
Оценка эффективности. В списке группы РКТ1-51, в которой проходила апробация нового курса, 15 человек. Домашнее задание и рубежный контроль выполнены всеми студентами, успеваемость за семестр 100%. Специфика системы NOMOTEX позволяет сдать домашнюю работу только после выполнения всех задач, не полностью выполненное задание не будет засчитано в личном рейтинге обучающегося. Улучшает усвоение материала введение задач на арифметические действия, ранее не включаемые в контрольно-измерительные материалы. Сравнение с прошлыми учебными годами в данном контексте не совсем корректно, так как изменились многие условия преподавания: введение ЭИОС, увеличение количества заданий, изменение требований и правила начисления баллов. Прежняя система обучения не предполагала начисления баллов за наличие конспекта лекций, в текущем варианте предъявление конспекта является обязательным и способствует повышению организованности и уровня знаний. Согласно отзывам студентов, нововведения были восприняты ими позитивно. Таким образом, при данном наполнении курса авторы предполагают успешное освоение студентами некоторых глав алгебры кватернионов, с учётом дальнейшего применения полученных знаний в области ориентации твёрдого тела. Следующий уровень профессионального обучения – составление кинематических уравнений движения с помощью кватернионов и расчёт реальных технических систем [11].
Верификация эталонов. Обновление курса преподавания теории кватернионов повышает соответствие компетенциям, заявленным в программе курса, прежде всего, ОПКС-1 специальности (24.05.06) «Способен применять естественно-научные и общеинженерные знания, методы математического анализа и моделирования, теоретического и экспериментального исследования для решения инженерных задач профессиональной деятельности».
Обучение студентов в условиях современной передовой ЭИОС, каковой является система NOMOTEX, имеет неоспоримое преимущество. Наличие собственной структурируемой библиотеки знаний, базы уникальных заданий, возможности мгновенной компьютерной проверки работ студентов, личные кабинеты с сохранением всех выполненных заданий делает работу студента и преподавателя продуктивнее и интереснее. Рациональная цифровизация образовательного процесса способна значительно повысить качество образования [12; 13].
Цифровизация образовательного процесса, внедрение новых образовательных технологий, постоянное обновление контрольно-измерительных материалов и привлечение к данным процессам старшекурсников кафедр приближает успешную реализацию намеченных целей, способствует формированию педагогических компетенций у выпускников математических кафедр [14], что согласуется с последними распоряжениями правительства о формировании педагогических кадров [15].
Заключение
Проведенная работа привела к повышению качества освоения предмета по курсу «Теория кватернионов», в цифровой образовательной среде были разработаны новые задачи с автоматической проверкой, с избавлением студентов от части громоздких вычислений, стимулируя будущих инженеров развивать математические знания и навыки программирования для решения прикладных задач. В планах авторов разработка заданий, посвященных составлению кинематических уравнений движения твердого тела с помощью кватернионов. Весьма полезным и интересным считаем получить отклик на свою работу, обмен опытом, методиками преподавания специальных, редких предметов и особенно вариантами конкретных практических заданий.
Библиографическая ссылка
Скуднева О. В., Белькова К. В. РАЗРАБОТКА КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫХ МАТЕРИАЛОВ ДЛЯ ПРЕПОДАВАНИЯ КУРСА АЛГЕБРЫ КВАТЕРНИОНОВ СТУДЕНТАМ ИНЖЕНЕРНЫХ СПЕЦИАЛЬНОСТЕЙ // Научное обозрение. Педагогические науки. 2026. № 1. С. 5-13;URL: https://science-pedagogy.ru/en/article/view?id=2599 (дата обращения: 04.07.2026).
DOI: https://doi.org/10.17513/srps.2599