

 science-review.ru
science-review.ru
Scientific journal
Научное обозрение. Педагогические науки
ISSN 2500-3402
ПИ №ФС77-57475
ADDITIVE TECHNOLOGIES WHEN CREATING ROBOTIC MANIPULATORS

Актуальность данной работы заключается в том, что в список приоритетных направлений развития науки, технологий и техники в Российской Федерации Указом Президента Российской Федерации от 16 декабря 2015 года № 623 включен дополнительный пункт: Робототехнические комплексы (системы) военного, специального и двойного назначения, который направлен на:
1. Мониторинг работ в области робототехники;
2. Организацию работ по развитию ключевых технологий производства робототехнических комплексов;
3. Разработка эффективных компонентов робототехники российского производства
4. Методическое сопровождение испытаний робототехники и составных частей робототехнических комплексов. [1]
Роботизация в нынешнем виде подходит только для серийного производства, где необходимо обеспечение гибкости при достаточно больших объемах продукции. Но текущие решения достаточно габаритные, очень дороги и требуют наличия подготовленного высококвалифицированного персонала.
Однако, есть достаточно много производств, выпускающих не менее ответственные детали, со специфичными требованиями к параметрам рабочей зоны, в которых использование классических промышленных роботов проблематично, и экономически нецелесообразно.
Согласно прогнозам Tractica на ближайшие 10-20 лет доход при использовании промышленных роботов не изменится, в отличие от значительного роста при использовании непромышленных сфер.[2]
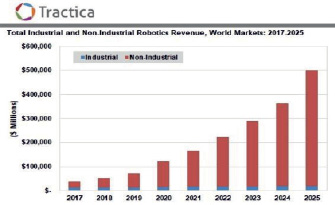
Рис. 1. Доходы от использования роботов
Широко используется новая методика изготовления роботов с применением 3D принтеров. Благодаря сокращению сроков разработки новых робототехнических решений темпы роботизации значительно растут, расширяется сфера цифровизации окружающей инфраструктуры и среды.
Согласно отчету IDC, к 2019 году 30 % коммерческих роботизированных приложений будут представлены в виде бизнес-модели «Робот как услуга», что сократит затраты на развертывание роботов. [3]
В докладе также дается прогноз, что к 2020 году 60 % роботов будут зависеть от облачного программного обеспечения для определения новых возможностей ИИ и прикладных программ, что приведет к формированию рынка облачных вычислений робототехники.
Объект разработки.
Так как применение аддитивных технологий обеспечивает практически неограниченную свободу форм, не требует оснастки, то возможно создание любых объектов.[4] Так для отработки технологии было предложено создать малогабаритный манипулятор SCARA с использованием 3D печати, учитывающий требования к габаритным размерам, специфические условия эксплуатации, тип и габариты захватного устройства, а также массогабаритные характетики захватываемых объектов.
Роботы – манипуляторы типа SCARA (Selective Compliance Articulated Robot Arm) – это манипуляторы с избирательной податливостью. Роботы такой конструкции обычно выполняют операции сборки. Роботы типа SCARA работают быстрее, чем декартовые роботы, обладая меньшими габаритами за счет того, что «плечо» может сложиться. Это удобно при работе в ограниченном пространстве. [5]
Задачи, которые способен решить манипулятор:
1. Решение прямой и обратной задач кинематики;
2. Планирование траектории;
3. Расчет нагрузки на звенья, выбор приводов;
4. Программная и аппаратная реализация системы управления;
Так как вес перемещаемых объектов не превышает 15-20 г., было принято решение максимально облегчить конструктивные элементы. По этой причине в качестве базовой технологии изготовления была выбрана 3D печать.
По требуемым габаритам (вылет руки 200 мм и высота 180мм) были определены размеры звеньев, рассчитана нагрузка на элементы конструкции.
Так как нагрузка незначительна, то для данных приложений достаточно использование пластиков.
При синтезе 3D моделей и подготовке их к печати необходимо учитывать особенности применяемых технологий и материала, так как от этого зависят:
– минимальные и максимальные размеры деталей;
– точность получения формы и соответствие размеров;
– прочностные характеристики детали;
– долговечность деталей.
В результате анализа текущих технологий и имеющегося оборудования было принято решение использовать технологию лазерной стереолитографии (SLA-печать) из-за следующих свойств:
– изготовление моделей любой сложности (тонкостенные детали, мелкие детали);
– высокие точность построения и качество поверхности;
– низкий расход материала на формирование поддержек;
– низкий уровень шума производства деталей.
Проектирование данного робота-манипулятора производилось в программном комплексе Solid Works. Далее была произведена подготовка модели к печати в программном комплексе FormLabs PreForm. Методом SLA была произведена печать и проведена постобработка модели. В процессе печати были обнаружены некоторые проблемы, такие как изменение размеров, плохая печать тонкостенных элементов, для которых требуются поддержки. Благодаря скорости печать, данные недостатки были устранены в короткие сроки, что позволило своевременно распечатать детали с необходимыми характеристиками.
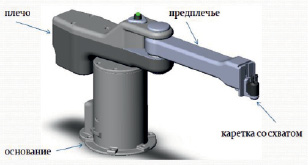
Рис. 2. Модель манипулятора SCARA
Характеристики манипулятора
|
Характеристика |
Значение |
|
Номинальная грузоподъемность манипулятора |
50 г |
|
Габаритно-установочные размеры манипулятора |
R = 210 мм H = 200 мм |
|
Зона обслуживания манипулятора |
R = 110 – 205 мм |
|
Число степеней подвижности манипулятора |
3 |
|
Погрешность позиционирования рабочего органа манипулятора |
Не более 0,1 мм |
|
Погрешность отработки траектории рабочего органа |
Не более 0,1 мм |
Доля заработной платы в затратах составляет 60 %. Такое распределение затрат стало возможным благодаря использованию 3D прототипирования, так как исчезла необходимость в сторонних организациях по оказанию услуг по производству элементов конструкции. Таким образом, изготовление опытных экземпляров экономически выгодно.
Использование аддитивных технологий возможно там, где требуется миниатюрность конструкции. В результате получаем то же качество при уменьшении размеров.
Таким образом, по желанию заказчика можно изготовить все, что угодно, в разумных пределах (ограничения по габаритам, грузоподъемности и т.д.).
Возможным применением данного проекта может быть обучающая робототехника:
– проектирование конструкции;
– системы управления;
– отработка кинематики и динамики.

Рис. 3. Прототип манипулятора SCARA
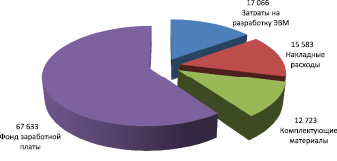
Рис. 4. Затраты на разработку манипулятора
Результаты представленного проекта являются одним из примеров эффективного использования современных технологий 3D прототипирования для сокращения сроков конструирования и отладки специфичных конструкций, а также новый, комплексный подход к обучению.
Использование 3D принтеров в обучение студентов по направлению «Робототехника и мехатроника» позволит получить нужные компетенции при изучении специальных и профессиональных дисциплин, таких как:
– основы мехатроники и робототехники;
– детали мехатронных модулей, роботов и конструирование;
– управление роботами и робототехническими системами и т.д.
Библиографическая ссылка
Мансуров Э.Р., Стахин Д.Р. АДДИТИВНЫЕ ТЕХНОЛОГИИ ПРИ СОЗДАНИИ РОБОТОВ МАНИПУЛЯТОРОВ // Научное обозрение. Педагогические науки. 2019. № 2-3. С. 53-56;URL: https://science-pedagogy.ru/en/article/view?id=1895 (дата обращения: 27.07.2026).