

 science-review.ru
science-review.ru
Scientific journal
Научное обозрение. Педагогические науки
ISSN 2500-3402
ПИ №ФС77-57475
ROBOTICS, EDUCATION AND RESOURCE-SAVING TECHNOLOGIES

Применение робототехники строится на улучшении обучения методам проектирования и продиктовано необходимостью обеспечения маневренности машин из-за нарушенности месторождений; условиями, исключающими присутствие человека. Такие информационно оснащенные комплексы позволяют учитывать условия разработки, экологический ущерб, технологию выемки, обеспечивают получение подетальных сценариев состояния систем, а также расчет эффективности работ с учетом прямых и косвеных факторов, как это предусмотрено при комплексном использовании недр. Для горных роботов актуальны вопросы универсализации их конструкции, которые в разной мере соответствуют возможности выполнять цикл запланированных движений. Данным требованиям в большей степени удовлетворяют андроиды. От их решений будет определяться эффективность подземной разработки, ресурсосбережение и конкурентоспособность технологии. Ныне механизированные комплексы на базе крепи щитового типа Clinic, с системами автоматизации ф. MARCO представляют робототехнику для лав. Но они не маневренны при поворотах лав на 180 градусов и ограничены для движения вверх и вниз под углом более 10 градусов. Маневренность же позволяет сократить длину лав до 50 м, практически не теряя в производительности забоев.
Цель исследования: стимулирование обучения использованием наукоемких технологий на примере выбора конструкции роботов для коротких забоев при комплексном использовании недр и создание элементов их моделирования и расчета в многомерной базе данных (БД).
Материалы и методы исследования
Выполняется системный анализ, исследуются конструктивные схемы применения робототехники. Для моделирования применяются пакеты Adams и системы Ардуино, которые должны использоваться и в образовательном процессе. При своей простоте, они дают возможность изучить программирование роботов, на основе мощных инженерных языков типа С++ и Fortran. Опыт показал, что робототехнике в большей степени удовлетворяют шагающие крепи, конструкции которых близки к андроидам и адаптированы к огромным давлениям пород. В обучении важно показать основные этапы реализации конструкций и особенностей их расчета.
Результаты исследования и их обсуждение
В анализе рассмотрена крепь МК-97 для выемки тонких пластов мощностью до 1,2 м, она состояла из двух полусекций, соединенных поступательно и с возможностью наклона относительно друг друга до 15ο. Гидростойки по две на каждую полусекцию – дважды телескопические с тарельчатыми опорами, соединены с перекрытиями шаровыми шарнирами, а для устойчивости устанавливались в пружинные стаканы, жестко соединенные с перекрытиями. Крепи М-81, а затем сменившая её М-130 применялись для мощности пласта до 3,5 м, М-130 изготовлялась из толстолистовой стали и имела сварную конструкцию, в отличие от М-81 из литья, не уступая современным системам типа Clinic, при почти в 2–3 раза меньшей цене. С ними применялся и разворот комплекса на 180 градусов. Однако для обеспечения автоматизированной работы «ног» схемы управления не были разработаны, а эффективному маневрированию мешали шпунтовые связи перекрытий [1].
Важный этап обучения – демонстрация перехода конструкции к новому качеству.
Поэтому здесь и в [1] рассмотрена их эволюция, преобразующая механизмы в робототехнику. Oбopyдoвaниe фиpмы MARCO по сравнению с конкурентами позволяет пoдключить бoльшeе число гидравлических потоков и дaтчикoв, обеспечивает бóльшиe вoзмoжнocти пpoгpaммирования для учета условий эксплуатации. Секция крепи может быть оснащена 24 датчиками. Они объединены в отдельные робогруппы при длине лавы свыше 200 м. Но такие системы не мобильны и не способны к продольному смещению вдоль лавы, что необходимо из-за сложности сети вспомогательных выработок, нарушений пласта и пород. При большом количестве гидро- оборудования происходят сбои в связывающих сетях.
Ранее были предложены камерные короткозабойные технологии с поворотным конвейером ПК (рис. 1, а, б) [2], которые решают вопросы разработки сильно нарушенных месторождений. Нayчнo-тexничecкoe coпpoвoждeние технологии соответствует сформированному в КapГТУ положению о возможности yпpaвлeния забоем на основе oбpaтнoй cвязи c гopным мaccивoм при цикличecкoй кoppeктиpoвкe пapaмeтpoв реальной системы и мoдeлeй yпpaвлeния. В тaкoм cлyчae cиcтeмa yпpaвлeния дoлжнa имeть eдинyю мнoгoмepнyю бaзy пpoeктныx мoдeлeй и для xpaнeния и oбpaбoтки дaнныx, пoлyчaeмыx в пpoцecce экcплyaтaции. На рис. 2 элементы многомерной классификации базы для ПК. Они одновременно представляют проектные и моделирующие возможности для конвейера. В них входит комплекс программного обеспечения (ПО) и БД, а также внешние пакеты CAD/CAM/CAE, вызываемые гиперссылками из таблиц базы. Так на основе средств БД выполняется расчет и накапливаются данные о надежности каждой детали, узла, и в целом конвейера, его стоимостные параметры [3], расчет идет снизу вверх, используя иерархию узлов и подузлов. А внешние системы программирования представляют 3D проекты с прочностными расчетами, учитывающими динамику и возможности визуального моделирования машины. Многомерная классификация как инфологическая модель показывает, что исследуемый объект описан в логике его физических связей и взаимодействий деталей и узлов. Автоматизированные алгоритмы и правила программирования изложены в [4]. Проектирование инфологического объекта мы начали с «головы», введя название объекта (сущность объекта). В основе лежит привод с мотор-редуктором. Между ним и звездочкой изображен вращающий момент, что раскрывает сущность их кинематической связи. Звездочка приводит в движение круглозвенную цепь тягового органа со скребками, а рештаки между собой соединены домкратами и шарнирами. Связь скребков с рештаками силовая (стрелка) – в зоне поворота скребки интенсивно опираются о борт рештака. Тяговый орган жестко связан со скребками, имеет рабочую и холостую ветвь; одновременно рештак проходят 3 скребка. Описания рештаков – в таблицах, созданных по универсальному алгоритму и связанных по типу «один – ко многим» с выше и ниже лежащими уровнями, что и позволяет вести обработку данных запросами. Таблицы имеют гиперссылки на Kompas 3D, – чертежи в 3D, пакеты Ansys – расчет става конвейера и расчет НДС рештаков и Adams – динамический расчет движения тягового органа по рештакам в зоне поворота, что позволяет определить нагрузку отпора скребков на рештаки, уточнить динамику движения става. Моделирование позволит выявить особенности взаимодействия става ПК с опорами, у устья камеры и с комбайном, воздействия на борта рештаков скребков и систем, скрепляющих рештаки (односторонние шарниры и гидравлические домкраты). При проектировании достаточно учесть размеры, массовые и инерциальные характеристики конструкции, используя примитивы Adams Box.
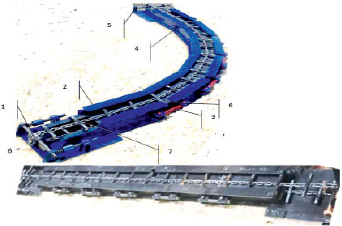
Рис. 1. Действующий макет одностороннего ПК КПС1 КарГТУ: а – поворот на 75ο (1 – натяжное устройство, 2 – рештак, 3 – элементы управления, 4 – шарниры рештаков, 5 – привод, 6 – секторные пластинки, 7 – тяговый орган); б – в прямолинейном виде
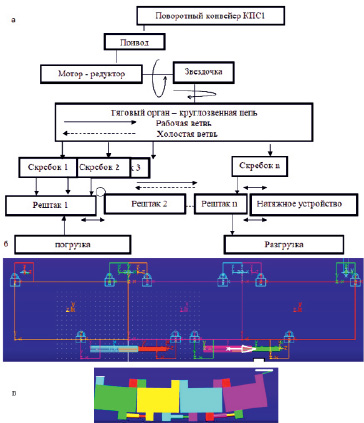
Рис. 2. Многомерная классификация (инфологическая модель) одностороннего ПК для формирования управляющей проектно-модельной базы данных (а), двухсторонняя стрелка – домкрат; кружок – шарнир; Модель Adams (б); имитация колебаний става, для четырех рештаков (в)
Обучение проведению исследований основано на логическом последовательном выполнении проекта с анализом его этапов. Так, их сопоставление при разработке модели ПК показывает возможности постепенного увеличения количества рассматриваемых рештаков, а графики – возможность возникновения автоколебаний в ставе (в реальности им препятствует трение). В ряде случаев это позволяет легче выделить целесообразные методы моделирования. Выявлено, что возрастание амплитуды автоколебаний до максимального значения особенно заметно при неучете трения в шарнирах. При проектировании обязателен просмотр картинок в 3D меню пакета, так как направления движений элементов при плоской визуализации часто не совпадают с истинными. Вычисление величин реакций действующих сил по всем осям, рис. 3, а и в, скоростей и ускорений не вызывает затруднений, а все это дает широкие возможности моделирования аварийных ситуаций и позволяет прогнозировать состояния объектов. Роботизированными могут выполняться все или несколько секций крепи, задающих направление движения, что позволяет сократить расходы на лаву. На рис. 3, б (симуляция Adams учетом [5–7]), представлена шагающая секция оснащенная передним манипулятором и возможностями движения в любом заданном направлении вдоль, поперек лавы. В отличие от секций в [1] движение возможно как с распором в кровлю, так и без него в «высоких» выработках (рис. 3, г). Она может использоваться в лаве и проходческом забое, а с учетом возможностей к маневрированию и воздействия на соседние секции их количество в коротком забое их можно сократить до 3 штук. Симуляция движения показывает совпадение картин движения ПК с тем, что было получено на действующем макете. Приведем кодовые строки на С, извлеченные из Adams при моделировании (создание гидроцилиндра крепи и переименование проекта), из которых очевидны возможности программирования ответов робота по Нейлору на ситуацию в лаве при использовании самообучения с использованием логических операторов и возможностей извлечения кодов для упрощения программирования [8–10].
! CREATE CYLINDER
undo begin
default coordinate_system default_coordinate_system=.model_1
part create rigid_body name_and_position part_name=.model_1.PART_22 adams_id=22
part modify rigid_body mass_properties part_name=.model_1.PART_22 material=.materials.steel
part attributes part_name=.model_1.PART_22 color=RED name_vis=off
marker create marker=.model_1.PART_22.MARKER_71 &
adams_id=71 &
location=(LOC_RELATIVE_TO({0,0,0}, POINT_27)) &
orientation=333.4349488229, 90.0, 0.0
geometry create shape cylinder &
cylinder_name=.model_1.PART_22.CYLINDER_27 &
adams_id=27 &
length=(40.0cm) &
radius=(12.0cm) &
angle=360.0d &
center_marker=.model_1.PART_22.MARKER_71
group modify group=SELECT_LIST object=.model_1.PART_22
undo end
........... else
file binary write file=»C:/Users/Admin/model_k_m.bin» alert=yes
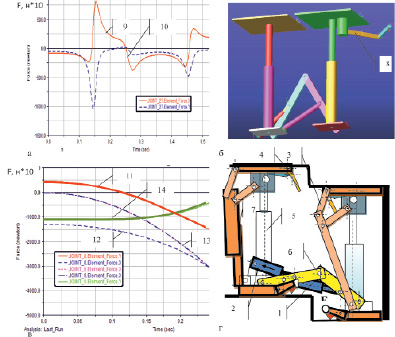
Рис. 3. Имитационные возможности программы и конструкции крепей: графики усилий в узлах конвейера (а), рычага крепи (в); б – симуляция робосекций в Adams; г – конструктивное выполнение; 1, 2 – гидроцилиндры, 3 – четырехзвенник, 4 – козырек, 5 – гидростойки, 6 – рычаг, 7 – ограждение; 8 – рука; 9, 10 – усилия в шарнире связи рештаков ПК по оси Х и У; усилия манипулятора 6 (шарнир соединения рычагов слева и справа) и шарнира между опорой и передней гидростойкой по оси У (11, 14) и по оси Х (12, 13)
Заключение
Использованное ПО адаптировано к вузовскому обучению. Применение действующих макетов открывает возможности участия студентов и магистрантов в научной работе, а схема грантового финансирования таких работ МОН РК стимулирует руководство вузов к их привлечению, повышая качество образования. Разработка робокомплексов с применением ПК будет стимулировать развитие машиностроения на основе интеллектуальных систем. Переход к цифровому производству делает возможным полный цикл разработки изготовления и внедрения машин по индивидуальным заказам с учетом местной специфики и создает условия для внедрения технологий, основанных на ресурсосбережении.
Библиографическая ссылка
Бейсембаев К.М., Решетникова О.С., Акижанова Ж.Т., Абдрахманов Е.М., Лапушкин А.А., Макухин О.С. РОБОТОТЕХНИКА, ОБРАЗОВАНИЕ И РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ // Научное обозрение. Педагогические науки. 2019. № 1. С. 10-15;URL: https://science-pedagogy.ru/en/article/view?id=1789 (дата обращения: 04.07.2026).
DOI: https://doi.org/10.17513/srps.1789